Dishwasher Simulation in PreonLab

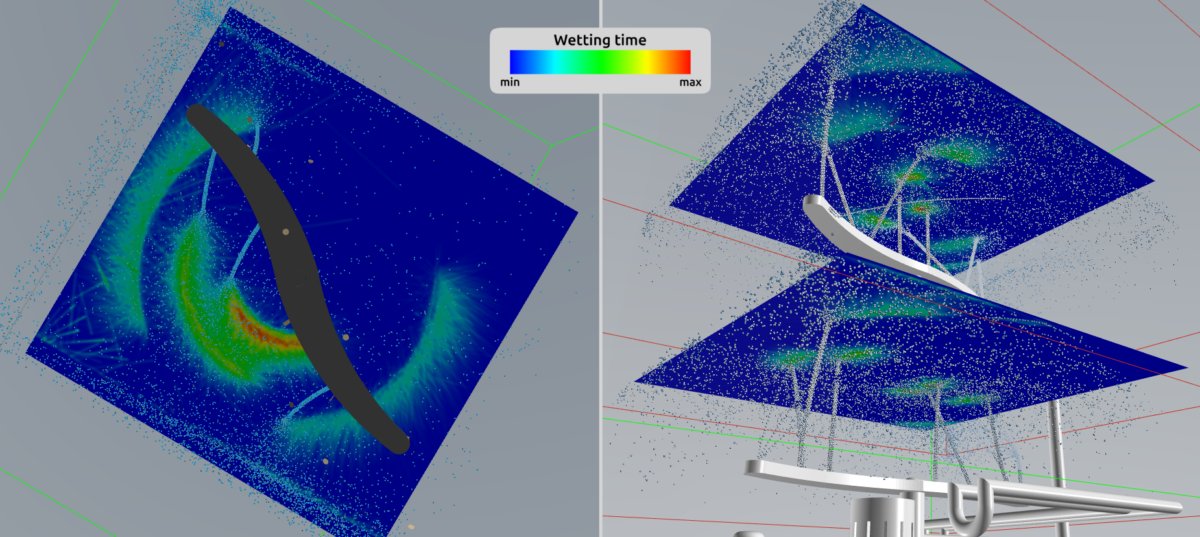
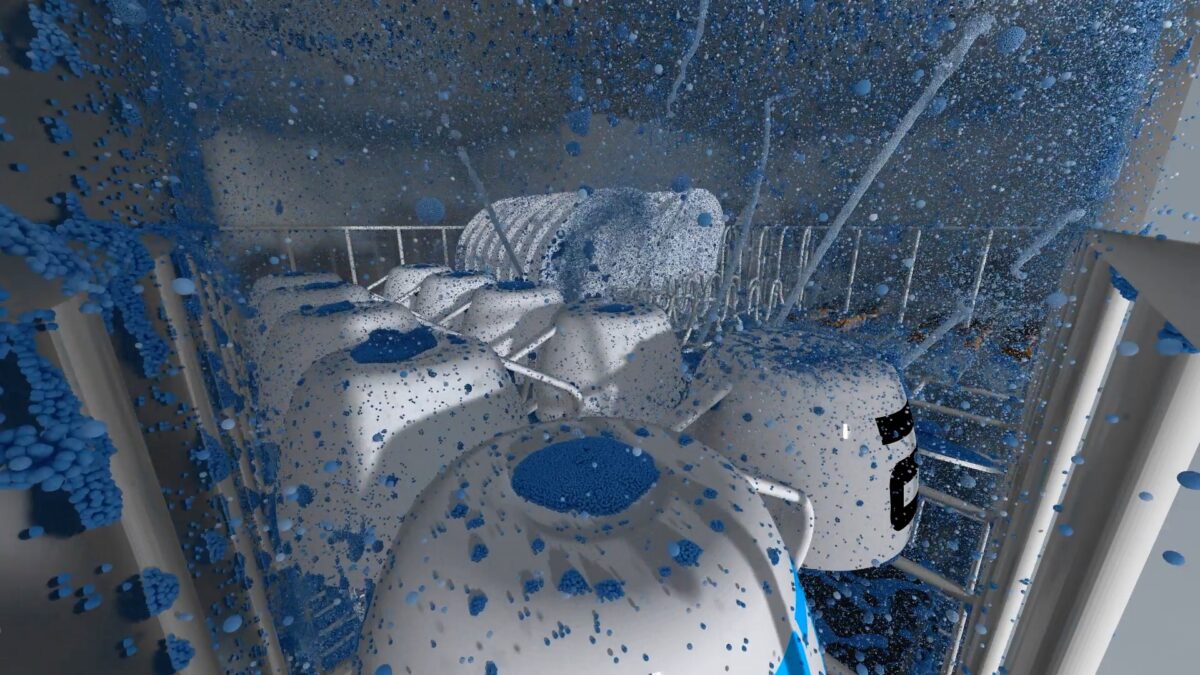
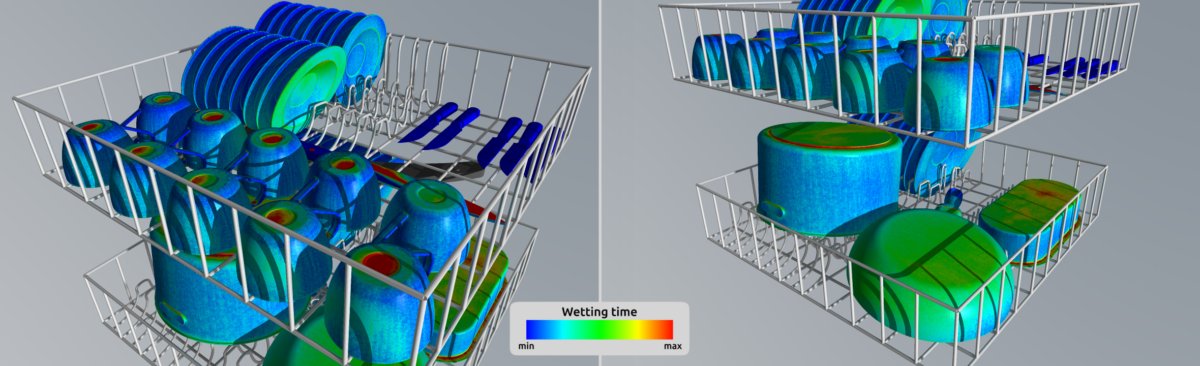
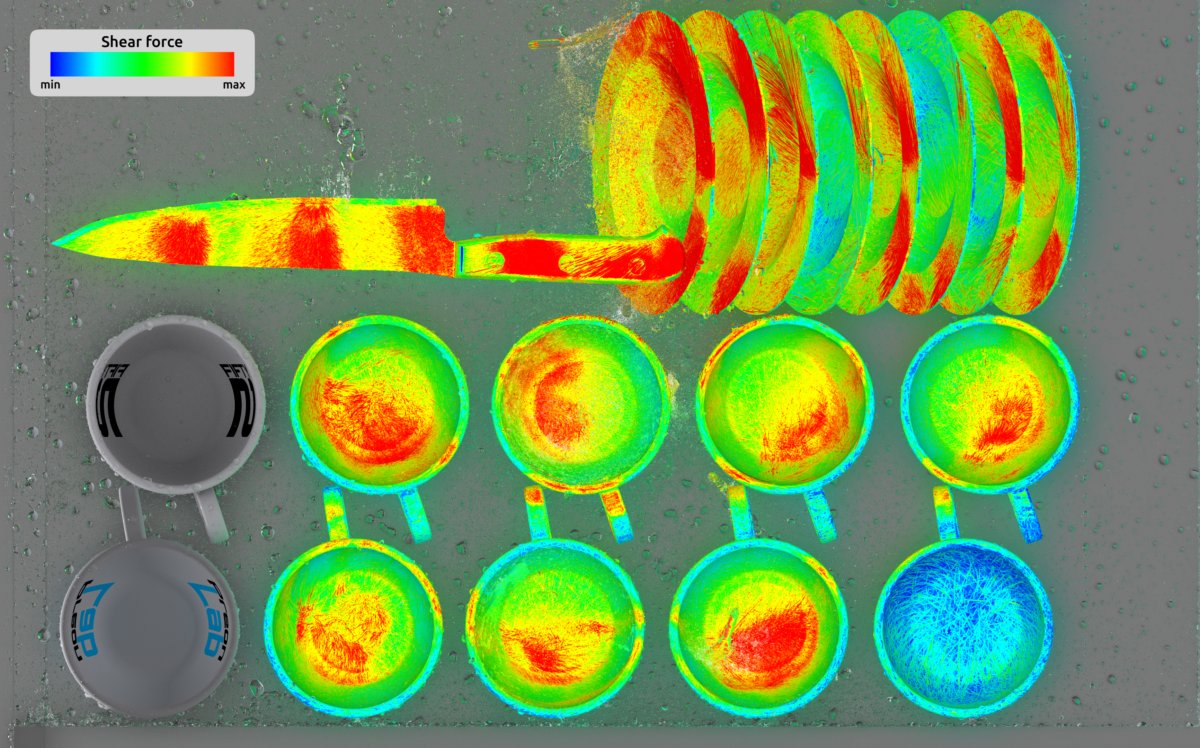
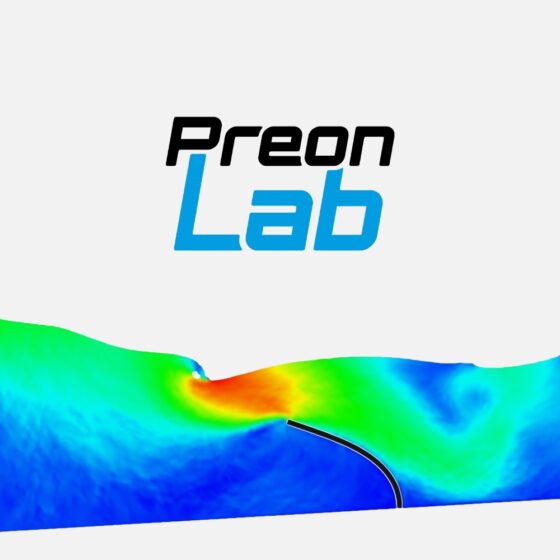
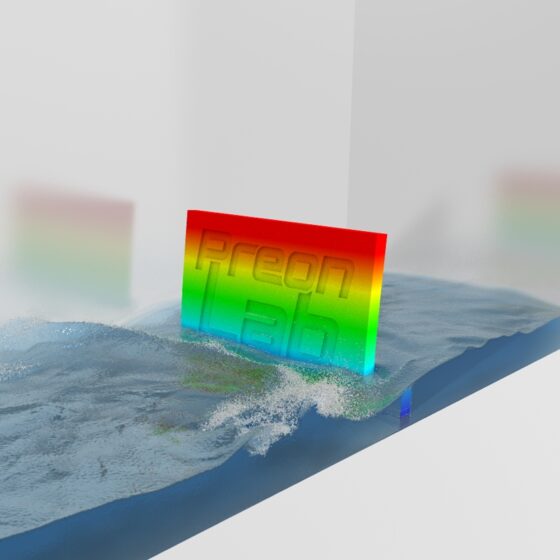
The possibility of quickly testing and analyzing different design variants has become of very high importance in the industry, including the white goods sector. This has made simulation a key. Particle-based CFD methods have already found their way into the workflow of engineering teams within this sector. As a leading particle-based CFD software, PreonLab offers high-fidelity flow simulations while being much quicker than the conventional methods, especially when it comes to pre-processing and computation. In this article, examples of how PreonLab can be used for the design and analysis of a dishwasher are demonstrated.
Share: